Echo-Hand
Exploring robotics from software integration to hardware and mechanical design
Objective
The Echo-Hand project aimed to design and implement a dexterous robotic hand capable of mirroring human hand gestures in real time. The project spanned the full robotics stack, including mechanical design, embedded control, and perception, with applications in surgical robotics and remote operation systems.
Process
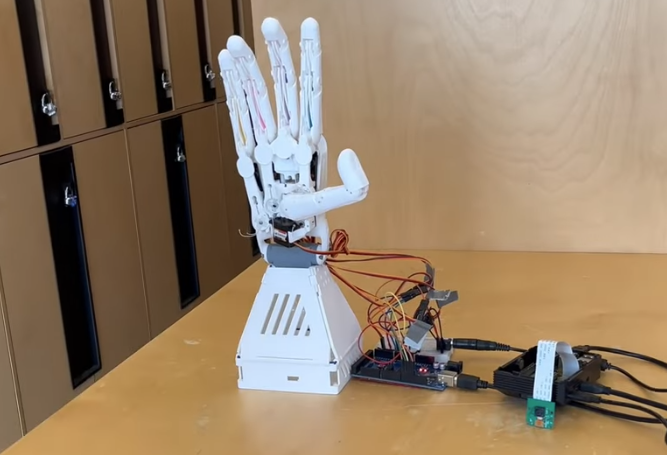
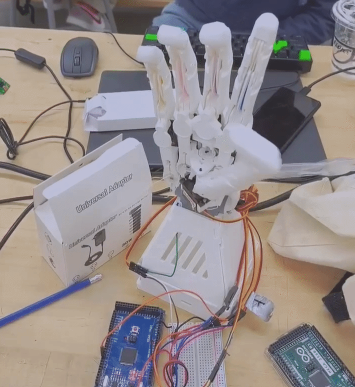
An existing 3D-printable robotic hand design was fabricated, with iterations on print orientation, material selection, and joint tolerances to ensure reliable motion and structural integrity. SolidWorks and rapid prototyping techniques were used to refine servo mounts and linkages, improving alignment and reducing backlash.
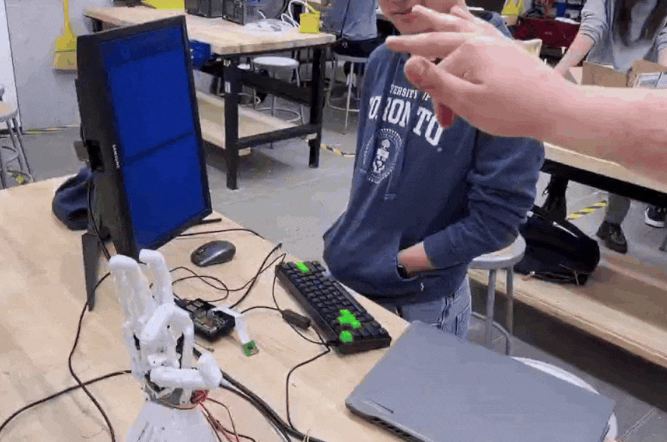
Control and perception were implemented across two platforms. A Raspberry Pi handled real-time gesture recognition using an OpenCV-based computer vision pipeline to process live camera input and extract hand motion data. An Arduino Uno implemented a PID-based control system in C++ to actuate servo motors precisely, translating detected gestures into smooth and responsive hand movements.
Challenges
Mechanical challenges included misalignment, joint friction, and inconsistent finger motion, which were addressed through iterative redesign, clearance adjustment, and careful servo calibration. On the software side, stabilizing gesture recognition under variable lighting conditions required optimization of OpenCV thresholds and refinement of tracking logic to reduce latency and computational load. Managing hardware sampling rates alongside software performance was critical to maintain real-time responsiveness.
Results
The completed system successfully demonstrated real-time gesture mirroring with smooth, coordinated finger motion. The project highlighted the importance of integrating mechanical design, embedded control, and computer vision algorithms. It reinforced best practices in rapid prototyping, sensor integration, PID-based motion control, OpenCV programming, and cross-disciplinary collaboration for reliable robotic systems.